Хорошие подводные аппараты поставляются в небольших упаковках
-109905 "Riptide AUV (Кредит BAE Systems)")
Riptide AUV (Кредит BAE Systems)
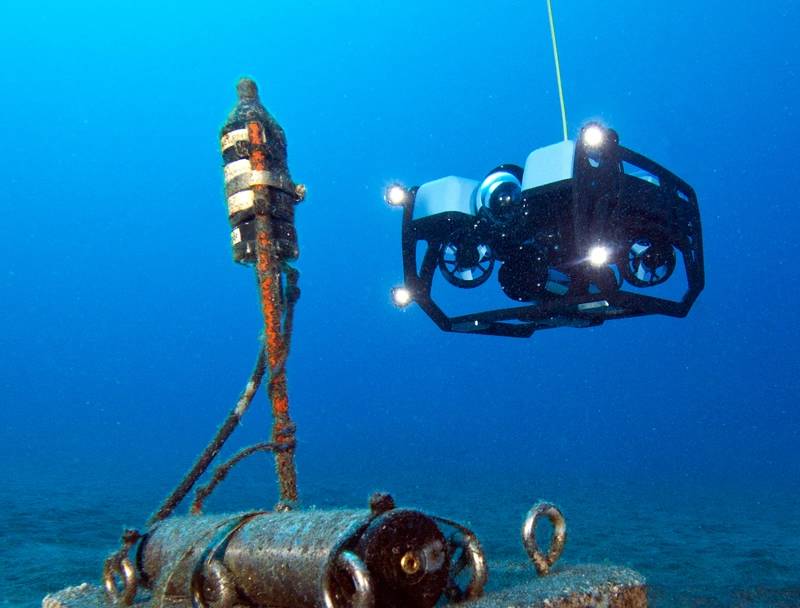
-109906 "Трайдент РОВ (Кредит ГНФАР Океан)")
Трайдент РОВ (Кредит ГНФАР Океан)
-109907 "RangerBot над рифом (Кредит Мэтью Данбабин / QUT)")
RangerBot над рифом (Кредит Мэтью Данбабин / QUT)
Праздничный сезон только что прошел, и многие, возможно, слышали фразу «хорошие вещи приходят в маленьких упаковках». Это справедливо для современных подводных аппаратов? Это действительно так. Одной из самых ярких тенденций последних лет в этой области является распространение компактных и доступных по цене, но в то же время высокоэффективных подводных аппаратов. В последнее десятилетие были выпущены новые дистанционно управляемые транспортные средства (ROV) и автономные подводные транспортные средства (AUV), которые легко переносятся и устанавливаются одним человеком. Эти малые транспортные средства, основанные на разработках в области схемотехники, датчиков и аккумуляторов, вдохновленных сектором бытовой электроники, в практических применениях превосходят свой весовой класс.
Есть много примеров как ROV, так и AUV, которые можно было бы рассмотреть, но выбор из четырех стоит рассмотреть в качестве примеров категории. Они также предлагают противоположные взгляды на некоторые ключевые технические и оперативные решения. Для ROV Sofar Ocean Trident представляет собой, пожалуй, вершину компактной производительности и оптимизации дизайна. В то время как Blue Robotics точно названа BlueROV, она представляет собой более гибкий вариант. В AUV высокотехнологичный «классический» подход демонстрирует микроавтобус BAE Systems Riptide, хотя и с очень гибким подходом к программному обеспечению. Новый участник из технологического университета Квинсленда, RangerBot, представляет новое изменение парадигмы, чтобы снизить затраты на конкретные случаи использования.
Начиная с ROV, BlueROV от Blue Robotics представляет типичный форм-фактор ROV. Спроектированный так же, как и крупный рабочий или исследовательский ROV, автомобиль имеет открытую раму с корпусами для электроники и аккумуляторов, подруливающими устройствами, плавучей пеной и грузом балласта. Этот простой дизайн является надежным, расширяемым и полностью знакомым в данной области. Система предлагает конфигурации с шестью и восемью подруливающими устройствами, множество дополнительных аксессуаров, а также значительную производительность и гибкость. Но новый подход к снижению затрат и управлению сложностью делает это переломным моментом.
Для снижения затрат BlueROV поставляется в частично собранном виде, для завершения которого требуется от шести до двенадцати часов пользовательской сборки. Хотя это экономит средства покупателя, оно также дает клиентам возможность понять компоненты и архитектуру системы. Это поддерживает инструмент, предназначенный для изменений и обновлений конечного пользователя. Автомобиль использует общие технологии беспилотных летательных аппаратов и использует встроенное программное обеспечение ArduSub с открытым исходным кодом, которое предлагает как полезные функции, так и обширное сообщество пользователей. Оператор управляет ROV с помощью портативного компьютера и игрового контроллера. Приложение QGroundControl с открытым исходным кодом предоставляет пользовательский интерфейс. Эта мощная комбинация технологий предлагается по удивительно низкой цене входа в 3500 долларов. Это приносит действительно способный ROV к значительной новой аудитории.
 A BlueROV (Credit Blue Robotics, Джефф Милисен). Кроме того, аудиторию ROV расширяет также Trident из Sofar Ocean, ранее OpenROV. Этот компактный ROV является примером в области инженерной оптимизации. Его форм-фактор и архитектура значительно эволюционировали по сравнению с другими ROV с питанием от батареи. Trident имеет уникальный дизайн, который сочетает в себе универсальность и управление ROV (дистанционно управляемым транспортным средством) и эффективность AUV (автономного подводного аппарата). Он может выполнять расширенные линейные разрезы и сложные маневры в ограниченном пространстве. Используя только три движителя, в уникальной конфигурации смещения, ROV может двигаться вперед эффективно, но маневрировать очень деликатно. Смещенный от центра вертикальный двигатель ROV может заставить его наклоняться на высоких скоростях, а также зависать или изменять глубину без качки при работе на низких скоростях - подобно тому, как работает традиционный ROV. В дополнение к элегантному гидродинамическому дизайну был разработан Trident быть очень портативным и довольно прочным. ROV достаточно мал, чтобы поместиться в рюкзак, а его боковые панели отлиты резиновым покрытием, придающим ему форму бамперов. Пользовательский интерфейс основан на интернет-стандартах, таких как HTML5 и WebGL, чтобы обеспечить пилотирование только через браузер, работающий на ноутбуках, планшетах и мобильных устройствах. Использование современных программных подходов с открытым исходным кодом гарантирует, что база кода может постоянно обновляться как сообществом, так и компанией. Это позволяет пользовательским программным изменениям, таким как новые пользовательские интерфейсы, формировать опыт эксплуатации и предоставлять улучшенные возможности ROV глобальному сообществу Trident.
A BlueROV (Credit Blue Robotics, Джефф Милисен). Кроме того, аудиторию ROV расширяет также Trident из Sofar Ocean, ранее OpenROV. Этот компактный ROV является примером в области инженерной оптимизации. Его форм-фактор и архитектура значительно эволюционировали по сравнению с другими ROV с питанием от батареи. Trident имеет уникальный дизайн, который сочетает в себе универсальность и управление ROV (дистанционно управляемым транспортным средством) и эффективность AUV (автономного подводного аппарата). Он может выполнять расширенные линейные разрезы и сложные маневры в ограниченном пространстве. Используя только три движителя, в уникальной конфигурации смещения, ROV может двигаться вперед эффективно, но маневрировать очень деликатно. Смещенный от центра вертикальный двигатель ROV может заставить его наклоняться на высоких скоростях, а также зависать или изменять глубину без качки при работе на низких скоростях - подобно тому, как работает традиционный ROV. В дополнение к элегантному гидродинамическому дизайну был разработан Trident быть очень портативным и довольно прочным. ROV достаточно мал, чтобы поместиться в рюкзак, а его боковые панели отлиты резиновым покрытием, придающим ему форму бамперов. Пользовательский интерфейс основан на интернет-стандартах, таких как HTML5 и WebGL, чтобы обеспечить пилотирование только через браузер, работающий на ноутбуках, планшетах и мобильных устройствах. Использование современных программных подходов с открытым исходным кодом гарантирует, что база кода может постоянно обновляться как сообществом, так и компанией. Это позволяет пользовательским программным изменениям, таким как новые пользовательские интерфейсы, формировать опыт эксплуатации и предоставлять улучшенные возможности ROV глобальному сообществу Trident.
Этот простой в использовании высокопроизводительный пакет доступен на Amazon по цене 1700 долларов. Это действительно новая эра для доступных и полезных океанских роботов. Те, кто ищет ограниченный опыт, могут выбрать высокооптимизированную систему или модульный подход с большей возможностью настройки для конечного пользователя. В любом случае, за счет современного ноутбука или ПК, он может быть полностью оборудован для выполнения значимых задач на глубинах до 100 метров. У желающих «перерезать шнур» есть дополнительные опции.
В последние годы эффективные AUV стали меньше и доступнее. Как и в случае с их двоюродными братьями ROV, есть несколько примеров для рассмотрения. Современный «микро» AUV, пожалуй, лучше всего ассоциируется с продуктами BAE Systems, ранее Riptide Автономные решения. Riptide - это история небольших транспортных средств и быстрого роста. Компания Riptide, основанная в 2015 году, быстро представила компактный AUV.
Первым продуктом Riptide был микро-UUV, очень гибкий, автономный подводный аппарат с открытым исходным кодом, предоставляющий современное, недорогое решение, хорошо подходящее для разработчиков автономии и поведения, подводных датчиков и других новых полезных нагрузок. Микро-UUV показал открытые аппаратные и программные интерфейсы, предоставляя пользователям надежную и надежную платформу для развития технологий. Дизайн автомобиля был оптимизирован для высокой эффективности с лучшей гидродинамической характеристикой в своем классе. Базовый микро-UUV составляет 4 7/8 дюймов в диаметре, 40 дюймов в длину и весит 22 фунта. Стандартная система рассчитана на глубину 300 метров.
Хотя это транспортное средство может выглядеть как «типичное» отраслевое предложение, оно отличается не только небольшим размером. Внимание к потребностям конечного пользователя было наиболее распространенным в разработке программного обеспечения. В отличие от типичных проприетарных архитектур, микро-UUV отличается гибкой архитектурой, использующей большое количество программного обеспечения с открытым исходным кодом. В первоначальном выпуске программного обеспечения micro-UUV Riptide предлагал код для платформ разработки Arduino и Beaglebone Black, а также поддержку механизма управления роботом MOOS-IvP. Это был мощный набор функций для любого AUV. При стартовой цене около 15 000 долларов рыночный интерес был значительным.
К 2019 году успех этого продукта был отмечен BAE Systems. Организация BAE Systems FAST Labs приобрела Riptide и в настоящее время совершенствует технологии платформы и масштабное производство. FAST Labs является научно-исследовательским подразделением BAE Systems, Inc. и является уникальным в
оборонная промышленность как внутренний, финансируемый заказчиком бизнес исследований и разработок, предназначенный для
сотрудничать по всему глобальному предприятию компании для разработки и передачи передовых технологий. Микро AUV, первоначально запущенный Riptide, извлекает выгоду из этого процесса.
Еще один небольшой AUV, недавно появившийся на сцене, это RangerBot. Этот автомобиль использует иной подход к предоставлению доступного решения для конечных пользователей. RangerBot был разработан инженерами Квинслендского технологического университета (QUT) в Брисбене, Австралия. Команда QUT работает в центре робототехники, специализирующейся на машинном зрении. Они также работают в поддержку экологических оценок на Большом Барьерном рифе. Ключевая смена парадигмы стала возможной, когда команда, осознав, что условия воды в их целевом окружении были очень ясными, решила использовать исключительно зрительное зондирование.
 RangerBot за рифом (Кредит Мэтью Данбабин / QUT) Возможно, это звучит очевидно, но, отказавшись от размера, мощности и, что особенно важно, штрафов за стоимость акустических инструментов, RangerBot стал меньше, проще в использовании и более доступным, чем типичные альтернативы. Используя серию камер, RangerBot может управлять как горизонтальным ходом по дну, так и глубиной. Используя новейшие инструменты для создания фото-мозаики, автомобиль также может создавать полезные информационные данные на месте съемки. Визуальные системы также допускают сложные приложения для управления окружающей средой. RangerBot и его предшественники-прототипы доказали свою способность идентифицировать морскую звезду «терновый венец» (COTS), хищника, способного разрушить коралловые рифы. AUV также продемонстрировали способность нести полезную нагрузку, которая может устранить COTS посредством точного введения раствора, который только наносит вред инвазивному организму. Интерфейс полезной нагрузки, который поддерживает эту миссию, также помогает с восстановлением рифа. На RangerBot можно установить мочевой пузырь объемом до 8 литров коралловых личинок. Используя свои возможности автоматического видения, AUV может идентифицировать надлежащие открытые пространства на деградированном рифе и вносить соответствующую концентрацию личинок. Таким образом, полностью загруженный RangerBot может посеять около 250 квадратных метров рифа. Это более эффективно, чем предыдущие методы, основанные на дайвере.
RangerBot за рифом (Кредит Мэтью Данбабин / QUT) Возможно, это звучит очевидно, но, отказавшись от размера, мощности и, что особенно важно, штрафов за стоимость акустических инструментов, RangerBot стал меньше, проще в использовании и более доступным, чем типичные альтернативы. Используя серию камер, RangerBot может управлять как горизонтальным ходом по дну, так и глубиной. Используя новейшие инструменты для создания фото-мозаики, автомобиль также может создавать полезные информационные данные на месте съемки. Визуальные системы также допускают сложные приложения для управления окружающей средой. RangerBot и его предшественники-прототипы доказали свою способность идентифицировать морскую звезду «терновый венец» (COTS), хищника, способного разрушить коралловые рифы. AUV также продемонстрировали способность нести полезную нагрузку, которая может устранить COTS посредством точного введения раствора, который только наносит вред инвазивному организму. Интерфейс полезной нагрузки, который поддерживает эту миссию, также помогает с восстановлением рифа. На RangerBot можно установить мочевой пузырь объемом до 8 литров коралловых личинок. Используя свои возможности автоматического видения, AUV может идентифицировать надлежащие открытые пространства на деградированном рифе и вносить соответствующую концентрацию личинок. Таким образом, полностью загруженный RangerBot может посеять около 250 квадратных метров рифа. Это более эффективно, чем предыдущие методы, основанные на дайвере.
Вдохновленные этими успешными исследованиями, команда QUT оптимизировала дизайн RangerBot для производства и готовится поддержать коммерциализацию. Когда этот вариант продукта появится на рынке, он предложит мощное решение, сочетающее в себе эффективность свободного плавания AUV с уровнями маневренности ROV, а также расширенные возможности для осмотра и осмотра. Предостережение заключается в том, что прозрачность воды должна быть достаточно высокой, чтобы визуальные технологии работали. Но в глобальном океане существует множество таких операционных сред.
Примеры, представленные здесь, предлагаются для подтверждения утверждения, что «хорошие подводные аппараты поставляются в небольших упаковках». Пользователи ROV и AUV могут найти множество вариантов, в том числе помимо систем, обсуждаемых здесь. Тенденции, лежащие в основе этих разработок, включают более широкое внедрение программного обеспечения с открытым исходным кодом, современных производственных инструментов и экономическую выгоду от других областей, в частности, бытовой электроники. Влияние инновационного мышления и дизайна чистого листа также заметно. Транспортные средства, представленные здесь, и многие другие компактные предложения на местах извлекают выгоду из мышления отдельных лиц или организаций, которые являются новыми для отрасли. Освобождение от старых технологий или концепций дизайна, кажется, является большой идеей, позволяющей меньшему сообществу подводных транспортных средств.
Надстройка платформы Hugin B на пути к освоению Северного моря
-171989 "(Фото: Aker BP)")
Компания Vattenfall установила первую моноопорную балку на крупнейшей в Германии морской ветроэлектростанции.
-171929 "Установка монопилы Nordlicht (Фото: DEME)")
Бывший глава Pemex находится под следствием по обвинению в злоупотреблениях; президент Мексики Шейнбаум не предоставляет ему никакой защиты.

Компания Vard поставила гибридный кабельный укладчик компании Toyo Construction.
-171805 "(Фото: Вард)")
Компания Equinor сворачивает японский проект по строительству морской ветроэлектростанции.

Плавучие атомные электростанции: новый рубеж в морской энергетике

Мерфи обнаружил нефть на шельфе Западной Африки.

Морское месторождение Мако приближается к началу добычи газа благодаря заключению контракта с компанией PT PAL.

-171635 "(Фото: Конрад)")
Компания Valeura завершила буровые работы на месторождении Нонг Яо, увеличив добычу в Сиамском заливе.

Компания PRIO вводит в эксплуатацию четвертую скважину в Ваху и завершает запланированный ввод в эксплуатацию.
-171544 "(Источник: PRIO)")
Компания Vaalco сообщает о высоких результатах бурения скважин у берегов Габона по мере продвижения буровой кампании.
-171461 "(Источник: Vaalco Energy)")
Компания Cadeler установила последнюю турбину на морской ветроэлектростанции Sofia мощностью 1,4 ГВт компании RWE.
-171414 "(Фото: Cadeler)")