Воображение будущего

Когда-то давно визуальный осмотр подводной инфраструктуры означал, что дайверы снимают неподвижные камеры до морского дна, надеясь, что корпус камеры не затопит или что пленка не будет чрезмерно обнажена или разрушена во время разработки. Даже используя первые дистанционно управляемые транспортные средства (ROV) с прямой трансляцией видео, было трудно заметить достаточно длинный взгляд на объект проверки из-за ограниченных функций управления и позиционирования при наличии какого-либо уровня тока.
Можно с уверенностью сказать, что индустрия прошла долгий путь с тех пор, и возможности визуализации расширяются с каждым днем. Фактически, проблема сейчас начинает заключаться в том, как обрабатывать «цунами» собираемых данных.
Эти вопросы были главными на повестке дня совместного семинара, проведенного Гидрографическим обществом в Шотландии (THSiS), Международной ассоциацией морских подрядчиков (IMCA) и Обществом подводных технологий (SUT) в Абердине в октябре.
С одной стороны, сенсорные платформы развиваются. И ROV, и автономные подводные аппараты (AUV) становятся все более быстрыми в использовании; У BP есть цель, чтобы к 2025 году 100% подводных инспекций было выполнено с помощью морских автономных систем (MAS), сказал на семинаре Питер Коллинсон, старший подводный и экологический специалист BP в нефтяной компании.
Они также становятся более автономными при поддержке наземных операционных центров. Equinor уже опробовал пилотирование операций ROV из береговых центров (через Oceaneering и IKM), и в этом году он собирается испытать змееподобного подводного робота Eelume в подводном гараже на месторождении Osgard на шельфе Норвегии на привязи. К 2020 году он надеется обойтись без привязи, сказал на семинаре Ричард Миллс, директор по продажам Kongsberg Maritime Robotics. Следующим шагом может быть использование в сочетании с беспилотными надводными судами.
Между тем, технологии визуализации, от лазера до фотограмметрии, помогают этим платформам собирать больше данных, быстрее и, возможно, также помогают им ориентироваться.
 Операции подводной разведки с использованием системы ORUS3D. (Источник: Comex Innovation)
Операции подводной разведки с использованием системы ORUS3D. (Источник: Comex Innovation)
Довольно - измеримый - фотографии
На лету съемки проводятся с помощью фотограмметрии. Летом 2018 года Comex Innovation завершила два проекта инспекции на шельфе Северного моря, используя свою технологию подводной фотограмметрии ORUS3D, ранее осуществляя проекты в Западной Африке, сказал Реймонд Рут, британский и североморский агент Comex Innovation. Обе операции, в британском и датском секторах Северного моря, требовали высокой точности измерения, одной из которых является поддержка модификаций месторождения.
Подводная оптическая система ORUS3D измеряет, а затем создает трехмерные модели подводных структур с высоким разрешением. Каждая система включает в себя интегрированный пучок трехфокальных датчиков с четырьмя широкоугольными светодиодными вспышками, а также блок сбора и обработки данных. Он использует триангуляцию объектов в захваченных изображениях, чтобы локализовать его относительное положение и построить трехмерную реконструкцию облака точек, которая может использоваться для измерений, так что инерциальная навигационная система или размещение цели на объекте для масштабирования не требуются при нахождении на площадке.
Интегрированный блок устанавливается на ROV для сбора данных в свободном полете на расстоянии более 40 см от конструкций, хотя наилучшее расстояние составляет 1-2 м от объекта. По словам Рут, это займет не больше времени, чем общий видео-опрос.
Первоначальная бортовая обработка в реальном времени выполняется для оценки местоположения и качества, до обработки на месте (на судне поддержки), для дальнейшей проверки качества данных и создания исходной масштабированной трехмерной модели с точностью до см. Затем выполняется окончательная обработка данных, которые собираются как данные облака точек, чтобы реконструировать площадку или объект в 3D-модели с точностью до мм.
 Результаты опроса ORUS3D (Источник: Comex Innovation)
Результаты опроса ORUS3D (Источник: Comex Innovation)
Автоматизированные события
EIVA работает над использованием методов машинного обучения и компьютерного зрения для автоматического обнаружения таких объектов, как аноды на трубе, повреждения труб и морские отростки, с использованием обычной камеры, сказал Мэтью Браннан, старший геодезист, EIVA. Использовать машинное обучение означает обучать систему с десятками тысяч изображений из конвейеров. Это то, что делает EIVA, и это приносит свои плоды. Компания провела испытания существующих наборов данных, которые были выровнены традиционным способом, поэтому было возможно сравнить автоматизированные результаты с искусственными событиями. В конце 2018 года он также начал живое тестирование во время операций на базе ROV. По словам Браннана, конечной целью технологии является автоматическое распознавание событий во время съемки AUV, позволяющее AUV что-то обнаружить и затем отправить сообщение на надводное судно.
EIVA также развивает обычные камеры, используя одновременное определение местоположения и картирование (SLAM) и фотограмметрию для создания областей карты, в то же время имея возможность определять местоположение камеры относительно того, что она отображает. Браннан объяснил, что существующие системы SLAM основаны на замыкании контуров, а решения для фотограмметрии требуют большого перекрытия изображений и хорошей видимости, и, как правило, не в реальном времени, пояснил Браннан. Некоторые также полагаются на дорогие стереокамеры, которые требуют калибровки и занимают много места, сказал он.
EIVA называет свою систему VSLAM, или Visual SLAM. Создавая разреженное облако точек на лету, VSLAM может найти себя (то есть транспортное средство, на котором он находится) в своей среде и использовать модель, которую он создает, для автоматического отслеживания и сканирования подводных структур. Это возможно с одной камеры, сказал Браннан, и из неподвижных изображений или изображений, извлеченных из видео, путем отслеживания точек на каждом изображении и оценки трека, используя эти точки, для построения разреженного облака точек, создавая цифровую модель местности. AUV также будет знать свое первоначальное абсолютное положение и может затем использовать путевые точки (т.е. ориентиры) вдоль маршрута.
Затем облако точек можно использовать для создания плотного трехмерного облака точек, а затем сетки с добавлением цвета и текстуры. У EIVA есть команда, работающая над этим с 2017 года, и сейчас она тестирует систему на AUV. В этом году будут запущены живые проекты с визуальной навигацией, сказал Браннан, и после этого он хочет помочь автономной инспекции и легкому вмешательству.
subSLAM
У Rovco есть видение развертывания AUV с автономным наземным транспортным средством (ASV) для проведения съемок и картографирования с использованием технологии 3D-изображения и картографии SubSLAM. SubSLAM позволяет ROV создавать 3D-карту своего окружения на лету, без использования других систем инерциальной навигации или позиционирования. Фирма называет это живым 3D компьютерным зрением.
 Живая концепция SubSLAM от Rovco (Источник: Rovco)
Живая концепция SubSLAM от Rovco (Источник: Rovco)
В технологии Rovco SubSLAM X1 Smart Camera используется система с двумя камерами для создания живого облака точек того, что она видит. Затем он используется для расчета положения автомобиля относительно того, на что оно смотрит.
По словам Джо Тидбола, Rovco использует SubSLAM на субатлантическом Мохаве, но делает его совместимым с другими платформами. В этом году фирма планирует приобрести свой первый AUV, Sabertooth, у Saab Seaeye, интегрировав SubSLAM в 2020 году, а затем внедрив искусственный интеллект (AI) в систему в 2021 году. Затем она планирует проводить опросы от ASV с 2022 года.
Тидбол сказал, что система подходит для подводной метрологии и может использоваться с транспортным средством без привязи, использующим акустическую связь, связанным со шлюзом наземной связи с радио / сотовой или спутниковой сетью, а затем с облаком, где инженеры могут получить доступ к инструменту измерения на основе браузера. - получать живые 3D-данные. С помощью ИИ автомобиль может сам делать оценки.
Rovco провела испытания своей системы SubSLAM на морской катапульте по возобновляемым источникам энергии в Блайте, на северо-востоке Англии, в августе 2018 года. Tidball сообщила, что компания проверила точность измерений, которую она могла достичь, используя данные наземных исследований конструкций в сухом доке, которые затем были затоплены, чтобы SubSLAM мог сделать свою работу в 1,2 м видимости. Подводные данные сравнивали с лазерным сканированием. По словам Тидбола, по сравнению с двумя часами, затраченными на съемку на открытом воздухе с погрешностью выравнивания 1,7 мм, SubSLAM добился ошибки 0,67 мм при двухминутном сканировании.
Тидбол сказал, что система могла бы отрицать необходимость в системах с длинной базовой линией (LBL) для точности позиционирования, но сказал, что видимость была фактором для работы камер. Хотя технология способна позиционировать ROV или AUV в своей среде, если она перемещается на другой сайт и не имеет привязи, потребуется инерциальная навигация.
Назад в будущее
Методы, используемые для создания облаков точек на лету, также могут быть использованы для создания облаков точек на основе существующих изображений или видеозаписей, сказал д-р Мартин Сайер, управляющий директор находящейся в Шотландии Tritonia Scientific. В качестве примера, Tritonia использовала свою технологию как часть анализа чистой экологической выгоды от оболочки платформы в тропическом месте, где оператор хотел определить, какой дополнительный вес морской рост может добавить к оболочке, для расчета операций подъема и утилизации на суше. планирование. Тритония была предоставлена оценка существующего ROV. Это было принято для исследований жизни рыб, а не для биообрастания куртки, поэтому оно не было разработано или предназначено для трехмерного моделирования. Две камеры HD и стандартная камера были установлены на ROV, левой, правой и центральной.
Из-за света в воде и большей части видеоряда, нацеленного на рыбу, около 95% из них были бесполезны. Остальные были сняты ночью, что делало его более подходящим, без поверхностных помех и лучшего контраста, позволяя моделировать почти полный участок ноги. При удалении известного объема ноги из модели может быть рассчитан объем морского прироста.
На лету
Для некоторых реальный потенциал всей этой технологии заключается в возможности обрабатывать данные в реальном времени и использовать эту информацию для обратной связи в живых (хотя и контролируемых) автономных системах.
Есть петля обратной связи, которая сделает эти операции более мощными. «Обработка данных [которые мы собираем] происходит автоматически, когда мы получаем ценность», - сказал Назли Дениз Севинч, руководитель проекта UROV, OneSubsea. «Плюс, [это] петля обратной связи в контролируемые алгоритмы автономии и обнаружение функций», - сказал Браннан.
Многое происходит Целью является контролируемая автономия, автономное обнаружение неисправностей, беспилотные операции без необходимости поддержки судов. Существуют препятствия, такие как законодательство, которое в области систем беспилотных судов отстает от технологии, которая доступна. Существуют проблемы со стандартами данных и с тем, как обрабатывать объем создаваемых данных, и, что не менее важно, адаптировать эти методы к современным рабочим процессам (или адаптировать сами рабочие процессы). Это быстро движущееся пространство для просмотра с огромным количеством размытых границ (если не изображений).
Цунами данных
Новые технологии визуализации создают новые возможности для подводной визуализации и автономии. Они также создают проблему «цунами данных» для операторов. Питер Коллинсон из BP сказал: «Одна из самых больших проблем заключается в том, что, когда вы начнете отправлять туда парки AUV, у нас будет цунами данных, поступающих к нам. Мы были сосредоточены на [сенсорных / опросных] платформах, потому что мы все еще укрепляем доверие к тому, что представляют собой эти системы и что они могут делать. Скоро выйдет кусок данных… который своевременно обрабатывает эти данные. Как нам сформировать цифровой близнец и перейти к прогнозирующему автоматическому обнаружению изменений во временных рядах? »
В то время как сбор данных развивается быстрыми темпами, в будущем основное внимание будет уделяться доставке данных людям, которые нуждаются в этом, таким как инженеры трубопроводов, в формате, который является значимым и полезным. По словам Малкольма Голда, из Fugro, искусственный интеллект поможет использовать облачные вычисления и автоматически обнаруживать аномалии или дефекты. Но для разработки систем потребуется время, сказал он. Fugro работает над этим и проводит испытания в Перте, которые помогли поднять проблемы с ИИ, такие как дифференцирование серебристого покрытия трубопровода от акулы. Будущие шаги включают создание автономии в этом ИИ. Но Голд предложил, чтобы новые модели также были рассмотрены. «Можно ли построить трубопроводы с датчиками, что делает его« умным »с самого начала при прогнозировании технического обслуживания», - спросил он. «В будущем речь пойдет не о том, какое оборудование вы используете для получения этих данных, а о том, что вы получите из этих данных».
Фактически, в будущем мы даже не будем смотреть на эти данные, предположил Джо Тидбол, старший геодезист из Rovco. Искусственный интеллект, робототехника, будут делать интерпретацию и принимать решения. «Я не думаю, что через 10 лет мы будем больше смотреть видео. Мы просто получим по электронной почте сообщения от роботов в Северном море о том, что вам нужно взглянуть на XYZ ».
Быстрая проверка трубопроводов
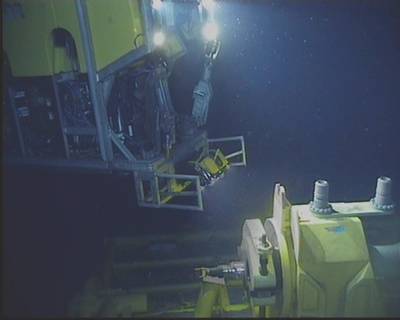
В ходе исследований трубопроводов BP сосредоточилась на том, чтобы делать что-то быстрее. В 2017 году BP заключила контракт с DeepOcean, используя «Fast ROV» (на фото выше, Superior ROV от норвежского Kyst Design) для обследования 478 км трубопровода (карта ниже), между объектами Clair и Magnus в Северном море до терминала Суллом-Во, на берегу Шетланд, от Брента и Ниниана до Магнуса - всего за четыре дня. По словам Коллинсона, исследование включало в себя лазер, фотокамеры высокой четкости и системы исследования катодной защиты (CP) с использованием градиента поля Force Technology, а также усредненное время проверки 5,1 т / час, в 6 раз быстрее, чем у стандартного ROV, и в 5 раз быстрее, чем у модифицированного стандартного ROV. , Он также включал данные бокового сканирования и многолучевой съемки. Конечным результатом был файл слоя 3D сцены, 2D мозаика с географической привязкой и списки событий / аномалий.
 Проект Deep Kyov, разработанный Kyst, используется для обследования трубопроводов BP компанией DeepOcean (Источник: BP)
Проект Deep Kyov, разработанный Kyst, используется для обследования трубопроводов BP компанией DeepOcean (Источник: BP)
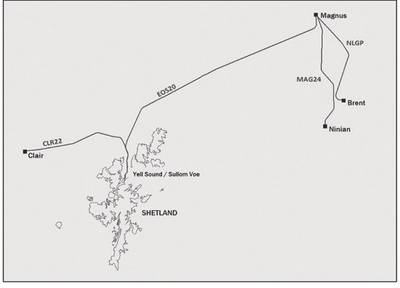 Обследование трубопроводной системы в течение четырех дней (Источник: BP)
Обследование трубопроводной системы в течение четырех дней (Источник: BP)
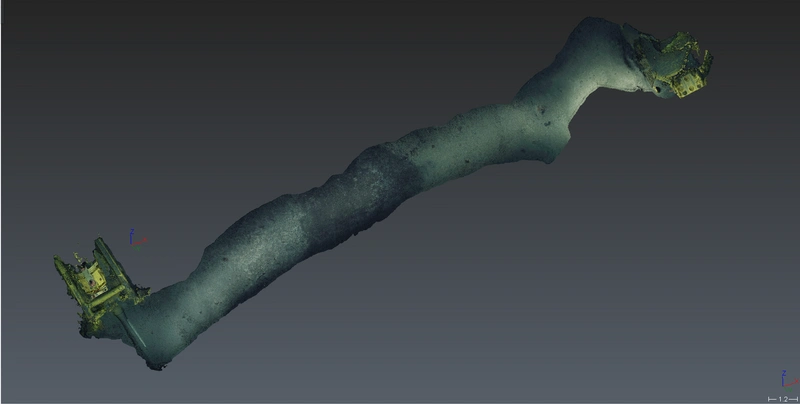
 Участок трубопровода, изображенный на съемке (Источник: BP)
Участок трубопровода, изображенный на съемке (Источник: BP)
Растягивающая акустика
Компания Schlumberger OneSubsea работает над проектом под названием UROV. Его целью является неуправляемый резидентский подводный аппарат с контролируемой автономией, что означает возможность связи с транспортным средством с берега посредством видео. Но в то время как доступные оффшорные сотовые сети 4G открывают воздушную видеосвязь, через водяные видеосвязи не так просто, сказал Назли Дениз Севинч, руководитель проекта UROV OneSubsea, в интервью международному морскому обществу Общества подводных технологий (SUT). Совместный семинар Ассоциации подрядчиков (IMCA) и Гидрографического общества в Шотландии (THSiS) в октябре.
Программа OneSubsea uROV планирует использовать автомобиль Saab Seaeye Sabertooth, оснащенный технологиями Schlumberger. По словам Севинка, зрение UROV находится где-то между AUV и ROV с ручным управлением, предлагая неуправляемую, но контролируемую автономию. Это может включать присутствие человека в петле, в то время как он работает на расстоянии до 3 км от наземного шлюза связи, например. беспилотная поверхность. Когда поблизости находится подводная инфраструктура, она также будет иметь до 200 м через воду канал передачи данных.
Это обеспечит доступ к подводным транспортным средствам 24/7. Но это означает, что вам нужен подводный Wi-Fi, расширенное зондирование, визуальное зондирование, расширенный контроль и автоматическая аналитика. Севинк сказал, что UROV будет использовать EIVA Navisuite для планирования миссии и уровень автономности, разработанный для Sabretooth. Но это зависит от обратной связи в реальном времени, которая зависит от связи.
Для операций на коричневом поле, UROV был нацелен на акустическую связь, что по сути означает низкую скорость передачи данных. OneSubsea, через базу Бостона своего владельца Schlumberger, работает над тем, сколько данных он может сжать через 100kpbs. В 2017 году Севинк сказал, что компания достигла передачи видео с лодки на лодку через акустический канал на скорости 100 кбит / с на протяжении 1 км. Затем он достиг аналогичных результатов с вертикальной передачей. Севинк сказал, что это верхний предел для видео, а оставшаяся полоса пропускания используется для команд. В течение 2018 года эта возможность была интегрирована в UROV, и в этом году планируется разработать возможность передачи видеоданных через 3 км и фактические развертывания к концу года. Другой набор, интегрируемый в UROV, включает лазерную технологию LiDAR (обнаружение и определение дальности) от 3D на глубине.
Надстройка платформы Hugin B на пути к освоению Северного моря
-171989 "(Фото: Aker BP)")
Компания Vattenfall установила первую моноопорную балку на крупнейшей в Германии морской ветроэлектростанции.
-171929 "Установка монопилы Nordlicht (Фото: DEME)")
Бывший глава Pemex находится под следствием по обвинению в злоупотреблениях; президент Мексики Шейнбаум не предоставляет ему никакой защиты.

Компания Vard поставила гибридный кабельный укладчик компании Toyo Construction.
-171805 "(Фото: Вард)")
Компания Equinor сворачивает японский проект по строительству морской ветроэлектростанции.

Плавучие атомные электростанции: новый рубеж в морской энергетике

Мерфи обнаружил нефть на шельфе Западной Африки.

Морское месторождение Мако приближается к началу добычи газа благодаря заключению контракта с компанией PT PAL.

-171635 "(Фото: Конрад)")
Компания Valeura завершила буровые работы на месторождении Нонг Яо, увеличив добычу в Сиамском заливе.

Компания PRIO вводит в эксплуатацию четвертую скважину в Ваху и завершает запланированный ввод в эксплуатацию.
-171544 "(Источник: PRIO)")
Компания Vaalco сообщает о высоких результатах бурения скважин у берегов Габона по мере продвижения буровой кампании.
-171461 "(Источник: Vaalco Energy)")
Компания Cadeler установила последнюю турбину на морской ветроэлектростанции Sofia мощностью 1,4 ГВт компании RWE.
-171414 "(Фото: Cadeler)")