Резиденция в ожидании
")
Долгое время было задумано, чтобы подводные аппараты могли поддерживать подводные операции без использования надводного судна. Мы ближе к этому видению, чем когда-либо прежде, но что нового не было раньше, чтобы это произошло?
Ранее в этом году что-то вехой было достигнуто в подводных транспортных средств в нефтегазовом бизнесе. Автономное подводное транспортное средство (AUV) подключается по беспроводной сети, заряжает и загружает данные, все индуктивно, с дистанционным автоматическим управлением и визуальным контролем в режиме реального времени во время демонстрации на озере в Швеции. Док-станция представляла собой стандартную подводную док-станцию (SDS) компании Equinor, а транспортным средством была Sabertooth Saab Seaeye.
Это шаг к тому, чтобы транспортные средства постоянно проживали под водой, и такие демонстрации будут проходить еще больше, в то время как другие проверяют свои новые автомобили. Но некоторые скажут, что мы были здесь раньше; это было опробовано в 1990-х годах. Так что нового? Это сочетание сил - ориентированных на рынок и технологий.
Для Gro Stakkestad, менеджера по подводному вмешательству и ремонту трубопроводов в Equinor, это сочетание спада, стремления к автоматизации и повышению осведомленности об окружающей среде. Штеффан Линдсё, директор по новым технологиям в Европе, в Oceaneering, говорит, что связь с офшором была основным недостающим компонентом, а также достижения в области аккумуляторных батарей и навигационных технологий, в то время как Шон Хэлпин, директор по управлению продуктами и маркетингу, в новой компании Houston Mechatronics, говорит, что снижение затрат и доступ к вычислительной мощности являются важными факторами. Движение к всей инфраструктуре электрического поля также поможет.
Последний кусок
Для Яна Сиешо, главного инженера Saab Seaeye, объединение стыковки, зарядки и загрузки данных стало последней частью головоломки, позволившей реализовать эту возможность в полевых условиях. Но в фоновом режиме было много других работ, в основном связанных с возможностями удаленного управления.
«Дистанционное управление на большие расстояния может показаться простым, но чтобы сделать его надежным, вам нужно много вещей на месте. Это не просто отправка команд по Интернету, это системы, которые могут поддерживать себя в безопасности, их можно обслуживать, чтобы они не работали неправильно, а если что-то идет не так, это не так сложно, вам нужен инженер университетского уровня, чтобы это исправить ». включает в себя ведение станции, навигацию по путевой точке и обход препятствий.
Что касается связи, Saab Seaeye работал с Boeing, управляя подводным транспортным средством (ROV) легкого рабочего класса Leopard по спутниковой линии связи в США, выполняя работу манипулятора, соединительные разъемы, полеты, полеты, управление путевой точкой и т. Д. » У нас были довольно жесткие ограничения, всего 1 Мб / с, и задержка, которую мы увеличивали до трех секунд, и мы намеренно испортили качество данных », - говорит Сиешо. «Несмотря на это, мы смогли соединить летающие соединители и многое другое. Долгосрочная цель - вывести ROV из очень большого AUV и выполнять интервенционную работу различными способами ».
 Sabertooth Saab Seaeye, который продемонстрировал индуктивную зарядку и загрузку данных в Швеции в начале этого года. (Фото: Saab Seaye)
Sabertooth Saab Seaeye, который продемонстрировал индуктивную зарядку и загрузку данных в Швеции в начале этого года. (Фото: Saab Seaye)
Глубокая работа - это еще одна проблема - как добраться до сайта, так и поддерживать связь. В начале этого года Saab Seaeye опробовал этот сценарий, проведя трехнедельные испытания на глубине 2400 метров в Средиземном море - привязанный и автономный - со 100% успешной связью и позиционированием транспортного средства, даже при полной тяге до 4 узлов, говорит Siesjö. Работа на этих глубинах включала в себя определение того, как эффективно добраться до рабочего места - 2400 метров - это долгий путь вниз - при сохранении позиционирования с использованием комбинации позиционирования инерциальной навигационной системы (INS) и ультракороткой базовой линии (USBL).
Saab Seaeye поддерживает свою работу с помощью симуляторов высокой точности (наподобие тех, которые использовались для тестирования истребителей своей материнской компании), поэтому он может запускать все автономные системы управления и контроль «человек в контуре» с помощью собственного программного обеспечения управления и выяснять, работают ли они. - задолго до того, как они уйдут в воду.
Кроме того, он работает над тем, как транспортные средства могут создавать в режиме реального времени 3D-карты окружающей среды, в которой они находятся, с использованием системы стереокамер для одновременной локализации и отображения 3D (SLAM). Это позволит автомобилю перемещаться и измерять то, что он видит относительно себя. Saab Seaeye тестирует эту возможность с 2018 года, создавая трехмерные облака подводного мира.
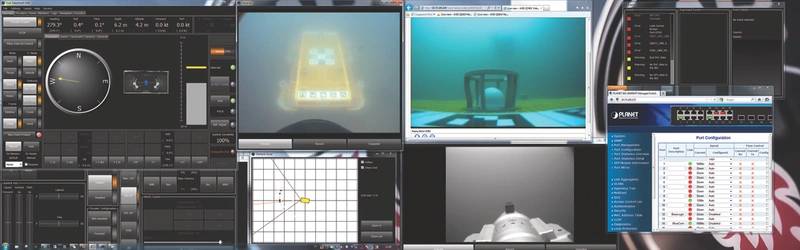 Простые в использовании передовые пульты дистанционного управления продемонстрировали стыковку с прямой трансляцией видео на берег. (Изображение: Saab Seaye)
Простые в использовании передовые пульты дистанционного управления продемонстрировали стыковку с прямой трансляцией видео на берег. (Изображение: Saab Seaye)
Геосуб в AIV
Еще одна компания, которая в течение некоторого времени создавала эту возможность, - Subsea 7. В 1990-х годах она поддерживала Geosub - технологию, лицензированную Subsea 7 у Национального океанографического центра (NOC). Его основной целью была автономная инспекция трубопровода с использованием навигации по путевым точкам и автоматического отслеживания для повышения качества и эффективности сбора данных обследования морского дна и снижения поддержки надводных судов. Хотя это был успех с точки зрения качества данных, его все равно нужно было запускать и извлекать с судна, и для позиционирования требовалась наземная поддержка. Он также не мог выполнять измерения катодной защиты, поэтому он был ограничен.
Subsea 7, благодаря своему бизнесу i-Tech 7, пошла дальше и теперь имеет свой автономный инспекционный аппарат (AIV), центральным для которого является возможность перемещения, разработанная под его предшественником, Prototype AIV, так что ей не нужно регулярное положение обновления с надводного судна. «Разработка была инициирована решением перейти на автономные парящие транспортные средства, сосредоточив внимание на возможности проверки подводной инфраструктуры внутрипромысловых участков. Поскольку цель была теперь сосредоточена на проверке существующего оборудования, само оборудование можно было отслеживать, чтобы обеспечить высокую точность местоположений, необходимых для навигации без обновлений с надводного судна ». Это похоже на автотрекер, но в 3D и может быть описано как форма SLAM.
AIV также имеет собственную подводную систему стыковки, которая отключает операции запуска и восстановления с судов. «Внедрение упрощенного планирования миссий, связанного с перераспределением навигационной системы и процессом, в котором AIV может самостоятельно стыковаться с корзиной, фактически разорвало связь с надежностью судна», - говорит Джеймисон.
 Удаленные операции также выполняются с ROV. Это береговый центр управления i-Tech 7 для операций с ROV. (Фото: i-Tech 7)
Удаленные операции также выполняются с ROV. Это береговый центр управления i-Tech 7 для операций с ROV. (Фото: i-Tech 7)
Стандартизированная стыковка
Большое влияние в этой области получили такие компании, как Equinor, которые выдвигают концепцию «дронов для подводного вмешательства» (UID), как их называют, и заключают контракты, в том числе на разработку SDS открытого стандарта, которую может использовать любое транспортное средство. , Конструкция SDS включает в себя индуктивные разъемы от маркировок Blue Logic и WiSub и AruCo и ChaRuCo, которые камера дрона видит, чтобы определить свое относительное положение. Компания Water Linked, занимающаяся акустической связью и позиционированием в Тронхейме, также поставляет небольшие акустические модемы для позиционирования автомобиля на станции. SDS также может работать с другими датчиками, такими как оптический модем SonCardm BlueComm для передачи видеоданных в реальном времени или загрузки данных с высокой пропускной способностью. Существуют также стандартные интерфейсы, разрабатываемые для механиков SWiG (Subsea Wireless Interface Group) и Deepstar.
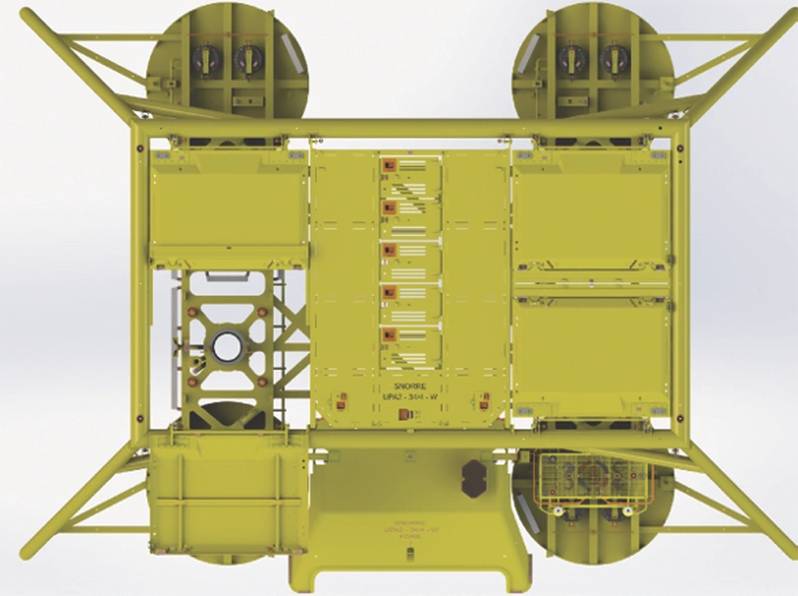 Конструкция подводной док-станции Equinor с открытым стандартом, прорезанная в виде коллектора, как маленькая вертолетная площадка. (Изображение: Blue Logic)
Конструкция подводной док-станции Equinor с открытым стандартом, прорезанная в виде коллектора, как маленькая вертолетная площадка. (Изображение: Blue Logic)
SDS, построенная Blue Logic в Норвегии, была развернута в доке в Тронхейме, а также в 2,2 км от берега на биологической станции Тронхейма на глубине 350 метров. Другой направляется на месторождение Осгард, где «змеиный робот» Eelume будет работать на силовом и оптоволоконном тросе, подключенном к плавучей производственной установке «Осгард А». Следующие шаги включают более широкое развертывание в проекте расширения Snorre, где можно использовать семь SDS (встроенных в коллекторы или автономно с защитными крышками из стекловолокна) на расстоянии 15 километров и подключенных к источнику питания и коммуникациям в полевой схеме.
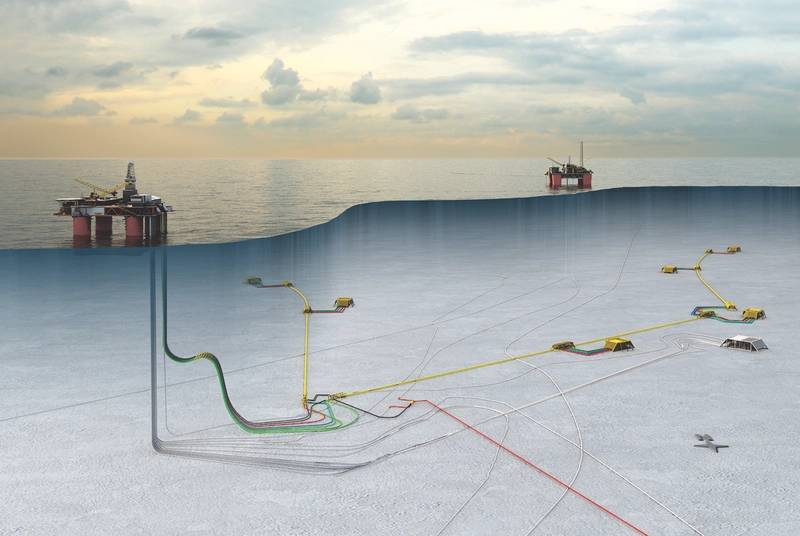 Макет поля проекта расширения Snorre, который вскоре может быть поддержан подводными дронами. (Изображение: Эквинор)
Макет поля проекта расширения Snorre, который вскоре может быть поддержан подводными дронами. (Изображение: Эквинор)
Разработка новых моделей
Эти события, в настоящее время, влияют на то, как планируются новые разработки, говорит Джеймисон. Действительно, i-Tech 7 исследовала IRM-сервисы для Equinor по всему полю, используя UID в проекте расширения Snorre (SEP) и Snorre A (SNA) в Норвежском море, а также в других областях.
В исследовании оценивалась возможность внедрения подводных гибридных транспортных средств путем выявления технических пробелов, которые могли бы помешать долгосрочному развертыванию UID на морском дне. Он также оценил и рекомендовал варианты конфигураций стыковочных станций для поддержки автомобиля, предоставив обзор требуемых конфигураций и характеристик. Поскольку мощность и надежная сеть передачи данных являются неотъемлемой частью ее успеха, компания изучила условия эксплуатации и управления для поддержки деятельности подводного гибридного транспортного средства. Конечная цель проекта состояла в том, чтобы рекомендовать план развития, чтобы дроны могли «жить» к концу 2020 года.
«Транспортные средства, размещенные на морском дне, поддерживаемые док-станциями на морском дне, используемые для автономных инспекций и связанные с береговыми диспетчерскими пунктами, для человека, находящегося в контуре контроля над задачами вмешательства, снова подталкивают требования в позитивном ключе», - говорит Джеймисон. «Транспортные средства должны будут постоянно проживать в подводных условиях в течение нескольких месяцев без обслуживания или восстановления для ремонта. Эта более высокая планка в надежности и управлении также расширяет возможности традиционных операций ROV с дистанционным управлением транспортными средствами из береговых центров управления и электрификацией транспортных средств для повышения надежности и эффективности ». Все это сокращает количество дней работы судов и людей в море.
Есть потенциал, чтобы сделать подводные системы проще. Приводы, кроме систем, критичных для безопасности, могут быть ручными, а не гидравлическими или электрическими, уменьшая гидравлические и электрические системы, которые необходимо устанавливать под водой - это означает, что требуется меньше кабелей.
Хельге Сверре Эйде, бизнес-менеджер Blue Logic, говорит, что для того, чтобы беспилотники взлетели под водой, необходимо изменить подводную систему и принципы работы. «Чтобы это было экономично, вам нужно увеличить объем работы дронов», - говорит он. «Вам нужны новые инструменты, и вам нужно настроить или изменить систему подводной добычи. Вам нужно изменить обе стороны уравнения. Новые инструменты должны быть легкими, чтобы на них мог летать дрон. Подводное техническое обслуживание должно быть заменено меньшими частями для замены. Другое мышление - если что-то отключается, вы можете просто изменить это - теперь возможно. Это новая философия ».
 (Фото: Сайпем) (Фото: Сайпем) |
В Италии Saipem был занят своим Hydrone R, который начал шестимесячные испытания в подводном «игровом парке» Saipem возле гавани Триеста на северо-востоке Италии. Недавно было объявлено, что транспортное средство будет развернуто компанией Equinor на шельфе Норвегии в 2020 году. Компания Equinor, от имени лицензии Njord, заключила с Saipem 10-летний контракт на подводное обслуживание на сумму 43,7 млн. Долларов США на использование этой технологии, начиная с момента начала добычи на месторождении Njord. , Hydrone R описывается как гибридный ROV с возможностями AUV, например, он будет иметь манипуляторы для интервенционных работ и может работать на тросе длиной 300 метров для управления в реальном времени по всей полосе пропускания, но он также может преодолевать расстояния между подводными поля, отвязанные как AUV, с акустической связью до 4 километров. Оказавшись на рабочем месте, он может переключиться на оптическую связь с высокой пропускной способностью для контролируемых операций. Hydrone может развертываться либо из гаража на морском дне, либо из наземной развернутой системы на миссии. По словам Стефано Маджио, технического директора Saipem, его мощность составляет 3000 метров, и он может работать без привязи 8-10 часов, а до 10 километров. «Развертывание с наземного хоста может быть проще, потому что вам не нужна подводная инфраструктура», - говорит Маджо. «Вы можете быть чувствительны к погодным условиям для развертывания, но у вас есть легкость в обслуживании». Однако «подводная резидентная система нечувствительна к погоде, поэтому вы развертываете ее и оставаетесь там в течение шести месяцев, год до восстановления. Но это означает, что вы не можете поддерживать его регулярно, поэтому требуется высочайшая надежность ». |
BOEM предлагает провести третью продажу прав на разработку месторождения BBG3 в Американском заливе.

Компания Dolphin Drilling и Vantris Ink заключили маркетинговое соглашение с Blackford Dolphin Semi-Sub.
")
Компания Mubadala наняла SLB для оказания услуг по глубоководному бурению на шельфе Индонезии.
-168002 "(Фото: SLB)")
Объединение компаний Transocean и Valaris создаст крупную компанию по морскому бурению стоимостью 17 миллиардов долларов с 73 буровыми установками.
")
Начался экспорт первой партии СПГ со второго этапа проекта Eni по строительству завода Congo LNG (видео).
-167856 "(Фото: Eni)")
Разведочная скважина на черноморском шельфовом блоке оказалась сухой.
")
На американской морской ветроэлектростанции Dominion Energy мощностью 2,6 ГВт впервые установлена турбина.
-167623 "(Фото: Dominion Energy)")
Компания Equinor продлила срок пребывания бурового судна Seadrill у берегов Бразилии.

Начало добычи на месторождении Семе компании Akrake запланировано на начало февраля после завершения буровых работ.
-167415 "Stella Energy 1 MOPU (Фото: Drydocks World)")
Компания Seadrill наращивает объем работ по морскому бурению, заключив контракты с компаниями из разных регионов.

-167309 "Буровое судно West Capella (Фото: Seadrill)")
Компания Brava Energia приобретет долю Petronas в активах бассейна Кампос за 450 миллионов долларов.
-167178 "(Источник: Brava Energia)")
Верфь Ulstein Verft спустила на воду первый из двух новых судов CSOV, построенных компанией JP Morgan.
-166941 "(Фото: Ulstein Verft)")